
Using an Infrared Proximity sensor.
 An IR proximity sensor is a sensor that uses Infrared signals to detect the nearness of obstacles. In one of my previous tutorials where I talked about the PIR motion sensors we realized that even though it is an Infrared sensor, it was a passive one! But in the case of the IR proximity sensor it is an active one and i will explain that shortly in the mode of operation.
An IR proximity sensor is a sensor that uses Infrared signals to detect the nearness of obstacles. In one of my previous tutorials where I talked about the PIR motion sensors we realized that even though it is an Infrared sensor, it was a passive one! But in the case of the IR proximity sensor it is an active one and i will explain that shortly in the mode of operation.
The reason why an IR proximity sensors is recognised as active sensors is because of its mode of operation. Unlike the PIR, it emits some amount of IR signals into the enviroment. Incase there is an object, this emitted IR rays will bounce back to the sensor and the sensor will judge by comparing the difference between the two signals(the sent and the received).
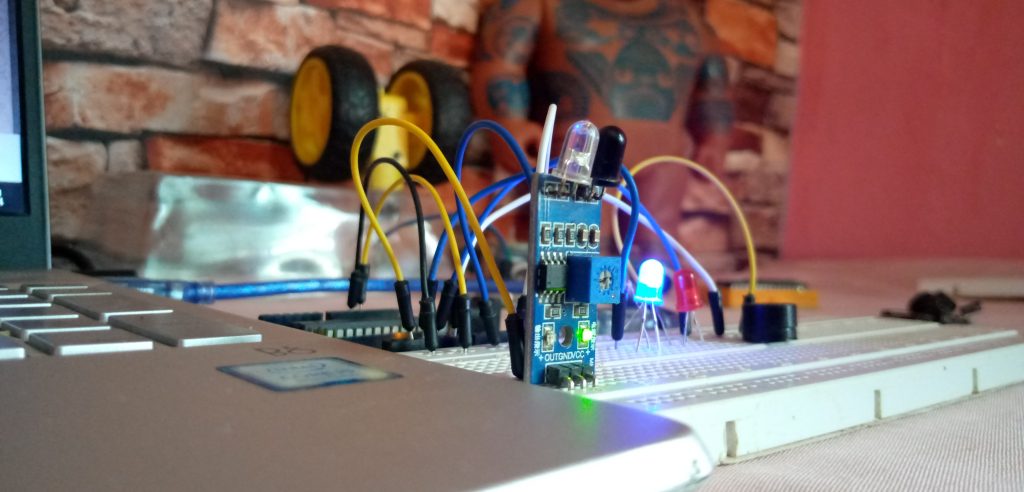
So in this particular IR module which is common to the maker community, there are two key components on the board,
- The IR LED

- The IR receiver
The blue potentiometer on it is used to regulate the sensitivity of the sensor.



Woow that’s great😘💪
Great for object detection😋
yhh one very sharp sensor I like paa